Lecture 3 - Backprop and Neural Networks
| 작성자 | 작성일 |
|---|---|
| 김보민 | 2022.01.12 |
NER
task
텍스트에서 entity를 찾고 분석하는 것
last night, Paris(PER) Hilton(PER) wowed is an sequin gown .
Samuel(PER) Quinn(PER) was arrested in the Hilton(LOC) Hotel(LOC) in Paris(LOC) in Apirl(DATE) 1989(DATE) .
특정 entity 를 tracking
Simple NER
Window classification using binary logistic classification
Idea
이웃하는 단어의 context window 에서 각 단어를 분류
-
hand-labeled된 데이터에 대한 logistic classifier를 학습시켜 단어 벡터 유사성에 기반해 각 class의 center word를 yes(high probability)/no로 분류함
- multi-class softmax도 자주 사용하지만, binary 가 simple하니까
example
Classify Paris +/- as location in context of sentence with window length 2
\[X_{window}=\begin{bmatrix} X_{museums} & X_{in} & X_{Paris} & X_{are} & X_{amazing} \end{bmatrix}^T\]-
\(X_{window}=X\in R^{5d}\) (column vector)
모든 단어를 분류하려면 문장에서 각 단어를 중심으로 하는 vector에 각 class에 대한 classifier를 실행
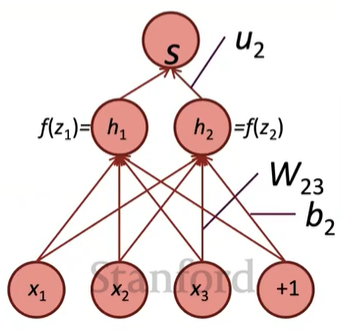
gradient
\[x=input \qquad h=f(Wx+b)\qquad s=u^Th\qquad J_t(\theta)=\sigma(s)=\cfrac1{1+e^{-s}}\]\(x=\) word window
\(h=\) hidden vector(layer 통과하고, 비선형성 더해주는 더 낮은 차원의 값)
\(s=\) 내적 통해 single number
\(J_t(\theta)=\) 특정 클래스에 대한 확률
-
SGD에서 gradient update하는 방법
\[\theta ^{new} =\theta ^{old}-\alpha\nabla_\theta J(\theta)\]\(\alpha\)는 step size나 learning rate
- 딥러닝에서는 data representation(word vector 등)도 update
-
\(\alpha\nabla_\theta J(\theta)\) 계산하는 방법
-
직접
-
역전파 알고리즘
-
Matrix calculus: fully vectorized gradients
gradients
기울기로서의 gradient
1 output and 1 input
\(f(x)=x^3\)
-
gradients: 함수의 미분값
\[\cfrac {df}{dx}=3x^2\]
1 output and n inputs
\(f(x)=f(x_1,x_2,\dots,x_n)\)
-
gradients: 입력에 대한 편미분 벡터
\[\cfrac {\partial f}{\partial x}=[\cfrac {\partial f}{\partial x_1},\cfrac {\partial f}{\partial x_2},\dots,\cfrac {\partial f}{\partial x_n}]\]
jacobian matrix : 일반화된 gradient
m outputs and n inputs
\(f(x)=[f_1(x_1,x_2,\dots,x_n),\dots,f_m(x_1,x_2,\dots,x_n)]\)
- gradients: \(m\times n\) matrix 편미분
\(\cfrac{\partial f}{\partial x} = \begin{bmatrix} \cfrac {\partial f_1}{\partial x_1} & \cdots & \cfrac {\partial f_1}{\partial x_n} & \\ \vdots & \ddots & \vdots \\ \cfrac {\partial f_m}{\partial x_1} & \cdots & \cfrac {\partial f_m}{\partial x_n} \end{bmatrix}\)
Chain Rule
단일 변수 함수의 미분: multiply derivatives
\(z=3y \\\quad y=x^2\\\quad \cfrac {dz}{dx}=\cfrac {dz}{dy} \cfrac{dy}{dx}=(3)(2x) = 6x\)
다변수 함수의 미분: multiply jacobians
\(h=f(z)\\\quad z=Wx+b\\\quad\cfrac {\partial h}{\partial x}=\cfrac {\partial h}{\partial z} \cfrac {\partial z}{\partial x}=\dots\)
- example: elementwise activation function
\((\cfrac {\partial h}{\partial z})_{ij}=\cfrac {\partial h_i}{\partial z_j}=\cfrac \partial {\partial z_j}f(z_i)\) definition of Jacobian
\(= \begin{cases} f'(z_i) \ \quad{\rm if}\ i = j \\ 0 \ \qquad\quad{\rm if\ otherwise} \end{cases}\) regular 1-variable derivative
\(\therefore \cfrac {\partial h}{\partial z}=\begin{bmatrix} f'(z_1) && 0 \\& \ddots & \\ 0 && f'(z_i) \end{bmatrix}=diag(f'(z))\)
-
other Jacobians
\[\cfrac{\partial}{\partial z}(f(z))=diag(f'(z)) \quad\qquad \cfrac{\partial}{\partial b}(Wx+b)=I \quad\qquad \cfrac{\partial}{\partial u}(u^Th)=h^T\]shape convertion 으로 계산 시, \(\cfrac{\partial}{\partial u}(u^Th)=h\)
Neural Net
Find \(\frac{\partial s}{\partial b}\)
- loss 의 기울기를 구해야하지만, 단순성을 위해 score의 기울기 계산
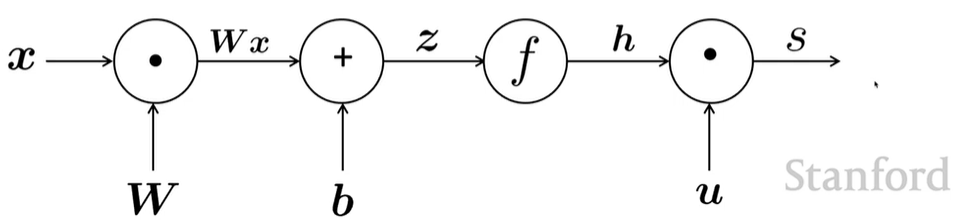
1. Break up equations into simple pieces
\(x=input \\\quad h=f(z) \\\quad z=Wx+b \\\quad s=u^Th\)
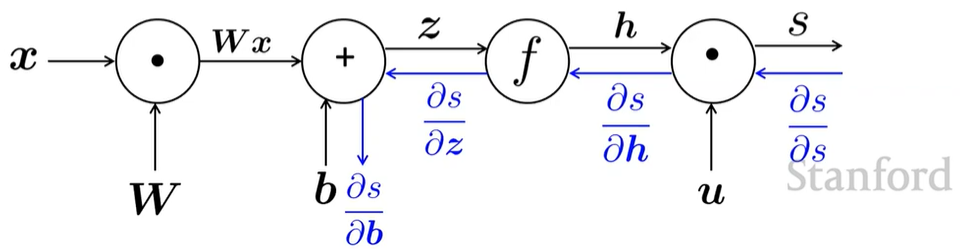
2. Apply the chain rule
\(\cfrac{\partial s}{\partial b}=\cfrac{\partial s}{\partial h}\cfrac{\partial h}{\partial z}\cfrac{\partial z}{\partial b}\)
3. Write out the Jacobians
\(\cfrac{\partial s}{\partial h}=u^T \\\quad \cfrac{\partial h}{\partial z}=diag(f'(z)) \\\quad\cfrac{\partial z}{\partial b}=I\)
\(\therefore \cfrac{\partial s}{\partial b}=u^Tdiag(f'(z))I=u^Tdiag(f'(z))=u^T\,∘\,f'(z)\)
Find \(\frac{\partial s}{\partial W}\)
- \(\frac{\partial s}{\partial b}\) 사용해 계산
\(\frac{\partial s}{\partial W}=\frac{\partial s}{\partial h}\frac{\partial h}{\partial z}\frac{\partial z}{\partial W}\)
\(\frac{\partial s}{\partial W}=\delta\frac{\partial z}{\partial W}\)
\(\frac{\partial s}{\partial b}=\delta\frac{\partial z}{\partial b}=\delta I=\delta\)
\(\delta=\frac{\partial s}{\partial h}\frac{\partial h}{\partial z}=u^T\,∘\,f'(z)\)
\(\delta\) is the local error signal
행렬에 관한 미분
계산 방법에 따른 output shape의 차이
\[\cfrac{\partial s}{\partial W} \qquad W\in \real^{n\times m}\]1 output , nm inputs: 1 by nm jacobian
-
output이 row vector → 마지막에 reshape(transpose) 해줘야 함
\(\theta ^{new} =\theta ^{old}-\alpha\nabla_\theta J(\theta)\) 계산이 어려움
chain rule 이 쉬움
nm outputs , nm inputs: shape convention
-
the shape of the gradient = the shape of the parameters = column vector
makes implementing SGD easy
gradient update 용이
\(\begin{bmatrix} \cfrac {\partial s}{\partial W_{11}} & \cdots & \cfrac {\partial s}{\partial W_{1m}} \\ \vdots & \ddots & \vdots \\ \cfrac {\partial s}{\partial W_{n1}} & \cdots & \cfrac {\partial s}{\partial W_{nm}} \end{bmatrix}\)
\(\frac{\partial s}{\partial W}=\delta\frac{\partial z}{\partial W}\)
\(\delta\)는 위에서 계산했고, \(\frac{\partial z}{\partial W}\)는 \(z=Wx+b\) 이기에 \(x\)가 됨
\(\therefore \cfrac{\partial s}{\partial W}=\delta ^T x^T\)
\(\delta\) is local error signal at z
\(x\) is local input signal
derivative of a single weight \(W_{ij}\) \(W_{ij}\) 는 \(z_i\)에만 연관
\(\cfrac{\partial z_i}{\partial W_{ij}}=\cfrac{\partial }{\partial W_{ij}}(W_ix+b_i)=\cfrac \partial {\partial W_{ij}}\Sigma ^d _{k=1} W_{ik}x_k=x_j\)
transposes 인 이유: dimensions 크기 맞추기 위해
\(\cfrac{\partial s}{\partial W}\;\;=\quad \delta ^T \quad \; x^T\)
\([n \times m] = [n \times 1][1 \times m]\)
\(= \begin{bmatrix} \delta_1 \\ \vdots\\ \delta_n \end{bmatrix} \begin{bmatrix} x_1, \dots, x_m \end{bmatrix}= \begin{bmatrix} \delta_1x_1 & \cdots & \delta_1x_m \\ \vdots & \ddots & \vdots \\ \delta_nx_1 & \cdots & \delta_nx_m \end{bmatrix} \)
Jacobian으로 계산 시 \(\frac {\partial s}{\partial b}=h^T\,∘\,f'(z)\) 는 row vector
- shape convertion 에서는 b가 column vector기 때문에 gradient 또한 column vector가 나와야 함
Backpropagation
-
taking derivatives and using the (generalized, multivariate, or matrix) chain rule
-
other trick: re-using derivatives computed for higher layers in computing derivatives for lower layers to minimize computation
Forward Propagation
source nodes: inputs
interior nodes: operations
edges pass along result of the operations
Backpropagation
loss가 줄어드는 방향으로 학습할 수 있도록 parameters를 수정
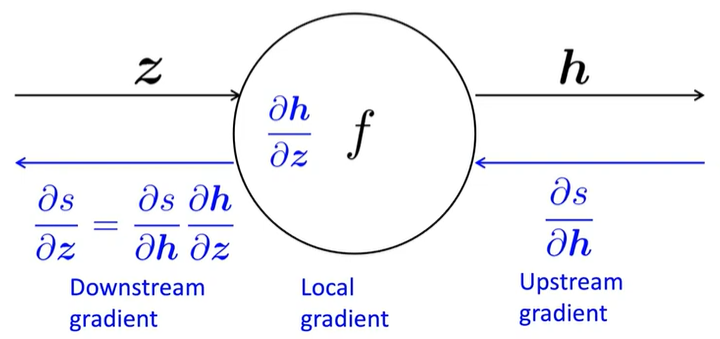
Single Node
node가 upstream gradient 를 받아 downstream gradient 를 전달
node : local gradient
downsteam gradient = upstream gradient \(\times\) local gradient
- single input
-
multiple inputs \(\to\) multiple local gradients
\[z=Wx\]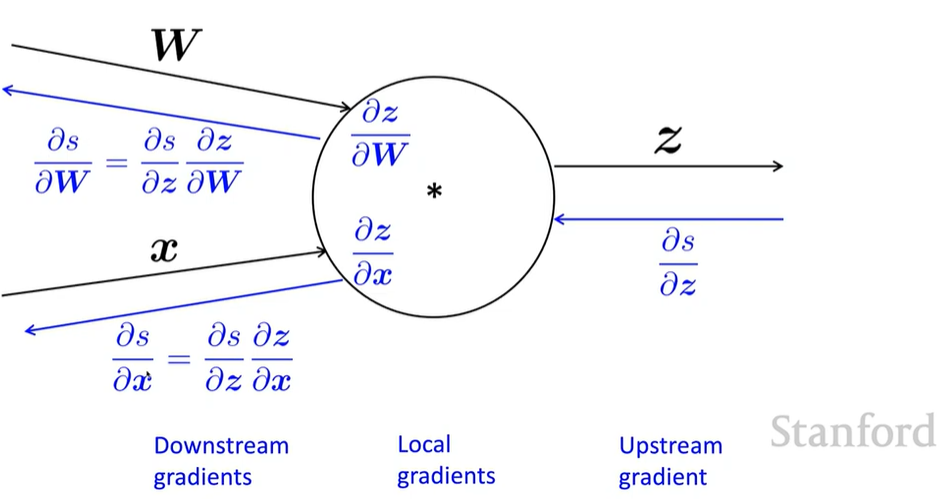
example
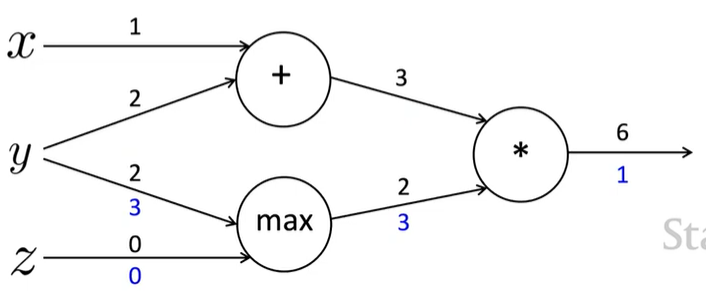
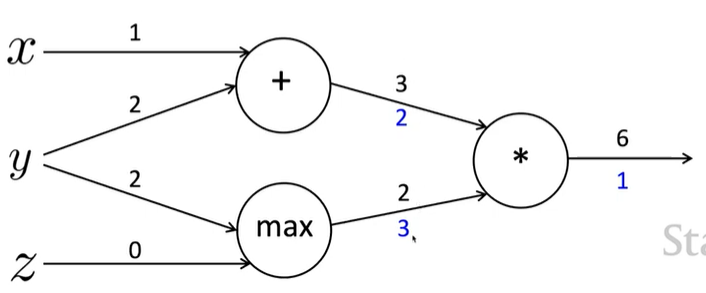
\(f(x,y,z)=(x+y)\,max(y,z)\)
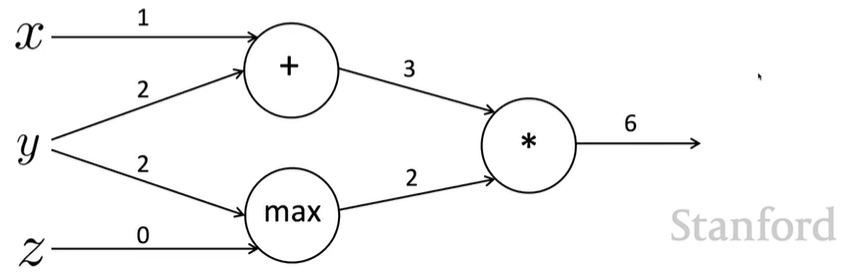
\(x=1,y=2,z=0\)
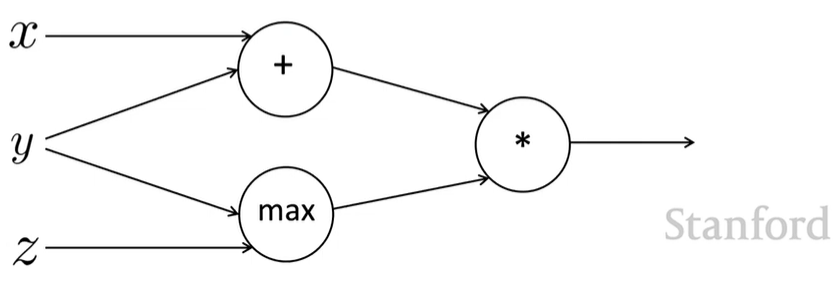
forward prop steps
\(a=x+y\)
\(b=max(y,z)\)
\(f=ab\)
local gradients
\(\cfrac {\delta a}{\delta x}=1\;,\quad \cfrac {\delta a}{\delta y}=1\)
\(\cfrac {\delta b}{\delta y}=1(y>z)=1\;,\quad\cfrac {\delta b}{\delta z}=1(z>y)=0\)
\(\cfrac {\delta f}{\delta a}=b=2\;,\quad \cfrac {\delta f}{\delta b}=a=3\)
\(\therefore \cfrac {\delta f}{\delta x}=2\;,\quad \cfrac {\delta f}{\delta y}=3+2=5\;,\quad\cfrac {\delta f}{\delta z}=0\)
node Intuitions
+ : upstream gradient 값을 그대로 downstream 으로 전달 (distributor)
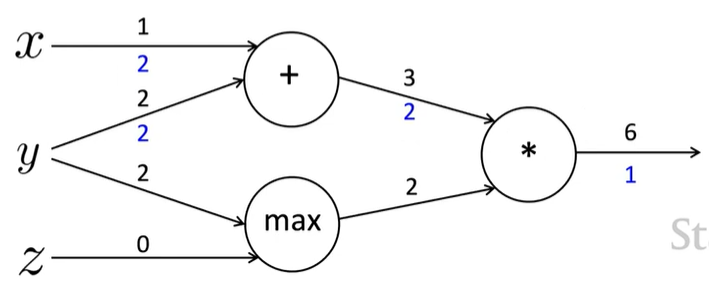
max : 더 큰 값으로만 gradient 전달 (routor)
x : upstream gradient 값 서로 바꿈 (switcher)
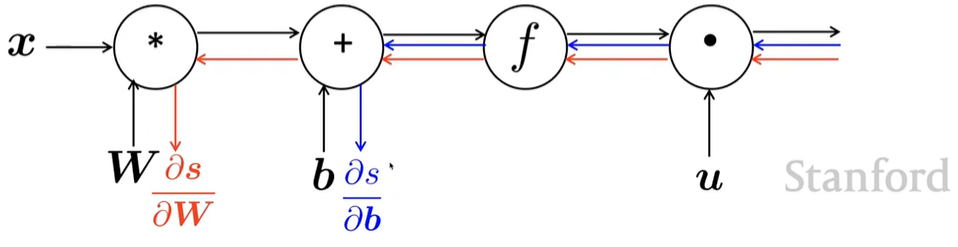
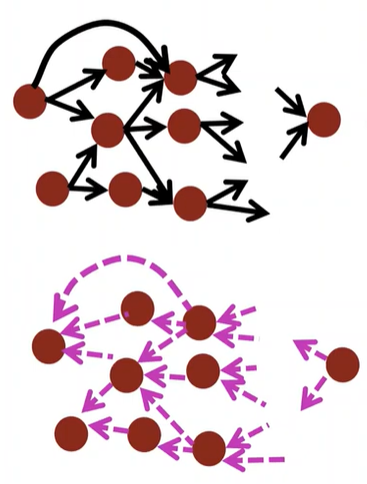
Efficiency
Incorrect
\(\cfrac{\partial s}{\partial b}\) , \(\cfrac{\partial s}{\partial b}\) 계산을 각각 독립적으로 수행(비효율적)
Correct
모든 gradient를 한번에 계산
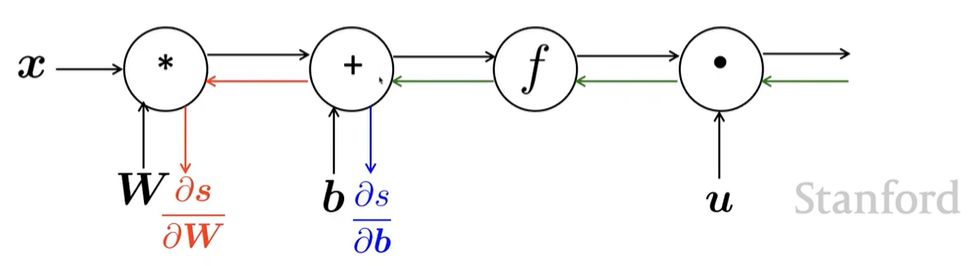
- gradient 직접 계산할 때 \(\delta\)를 사용하는 것과 유사
Back-Prop in General Computation Graph
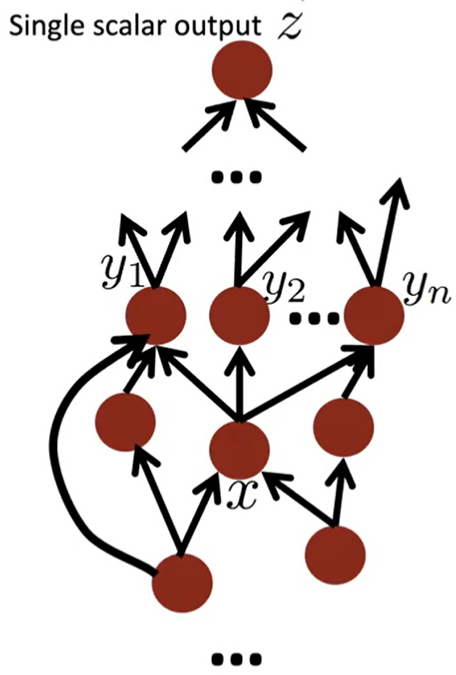
1. 순전파
위상정렬 순서로 node 방문하며 값 계산
2. 역전파
output gradient 1로 초기화한 후, 역순으로 node 방문하면서 gradient 계산
\(\{y_1,y_2,\dots,y_n\}=\) successors of \(x\)
\(\cfrac {\delta z}{\delta x}=\Sigma^n_{i=1}\cfrac{\delta z}{\delta y_i}\cfrac{\delta y_i}{\delta x}\)
맞게 계산됐다면 순전파, 역전파의 O(n) 는 같다.
일반적으로 신경망은 regular layer-structure 이기 때문에 matrices, Jacobians 사용 가능하다.
Automatic Differentiation
딥러닝 프레임워크들은 gradient 계산을 대신 수행하지만 이 과정을 이해하는 건 우리에게 도움이 되기 때문에 공부하자 !
역전파는 항상 완벽하게 작동되지 않는데, 이와 관련된 개념인 gradient vanishing이나 exploding 을 나중에 배울 예정.